Portfolio, 2026

Cédric Hollande
Robotics Master’s student at Penn building autonomy software for real robots: planning, controls, ROS 2, state estimation, and sim-to-real deployment. Recent work spans F1TENTH/RoboRacer MPPI on a Jetson Orin, off-road robot autonomy at GRASP ModLab, and ROS 2 / cFS rover software at NASA Goddard.
- MS Robotics, Penn
- F1TENTH / RoboRacer
- GRASP ModLab
- NASA Goddard
Featured work
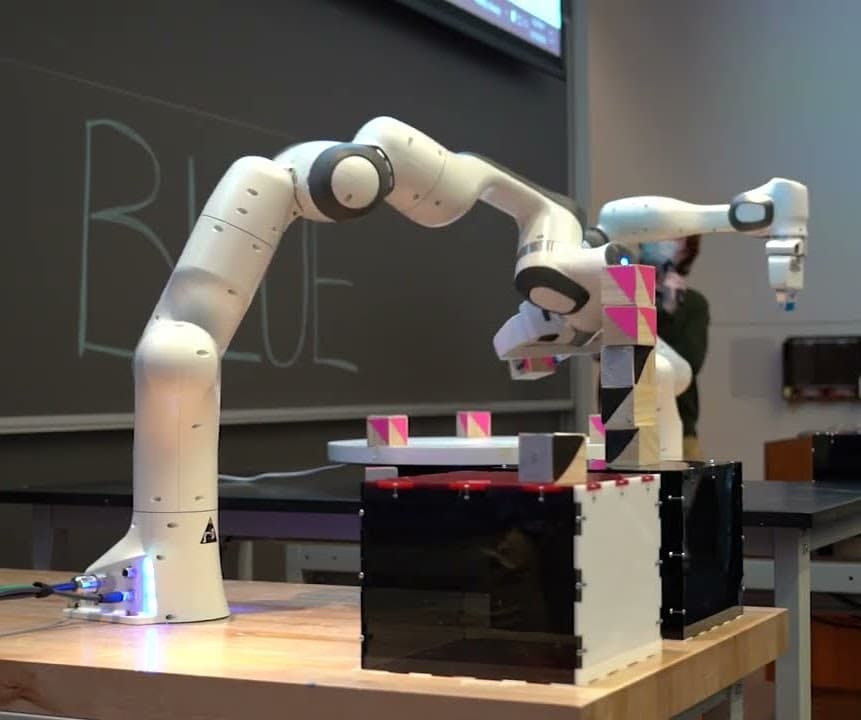
Autonomy on real robots.
Planning, controls, ROS 2, and sim-to-real, deployed on autonomous race cars, off-road mobile robots, and rover prototypes. Research, coursework, and competition.


Additional projects
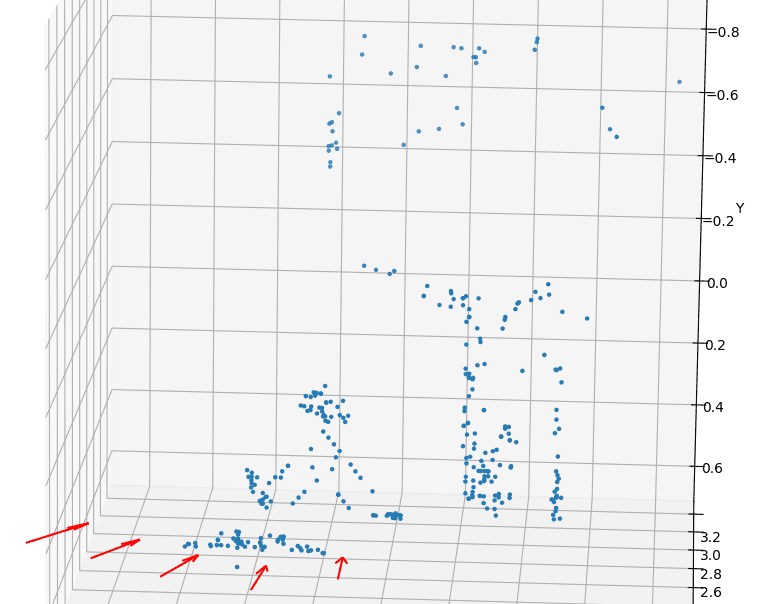
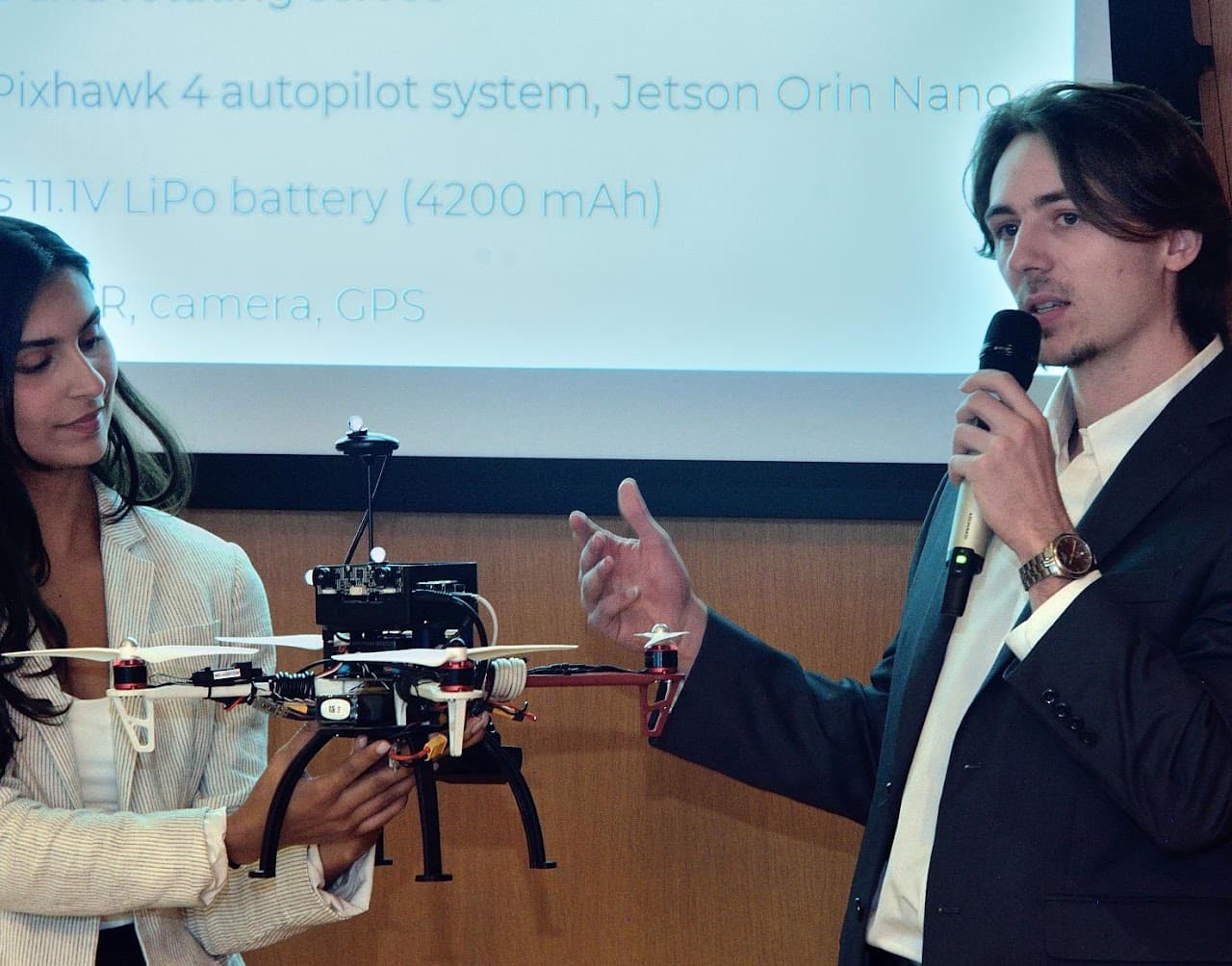
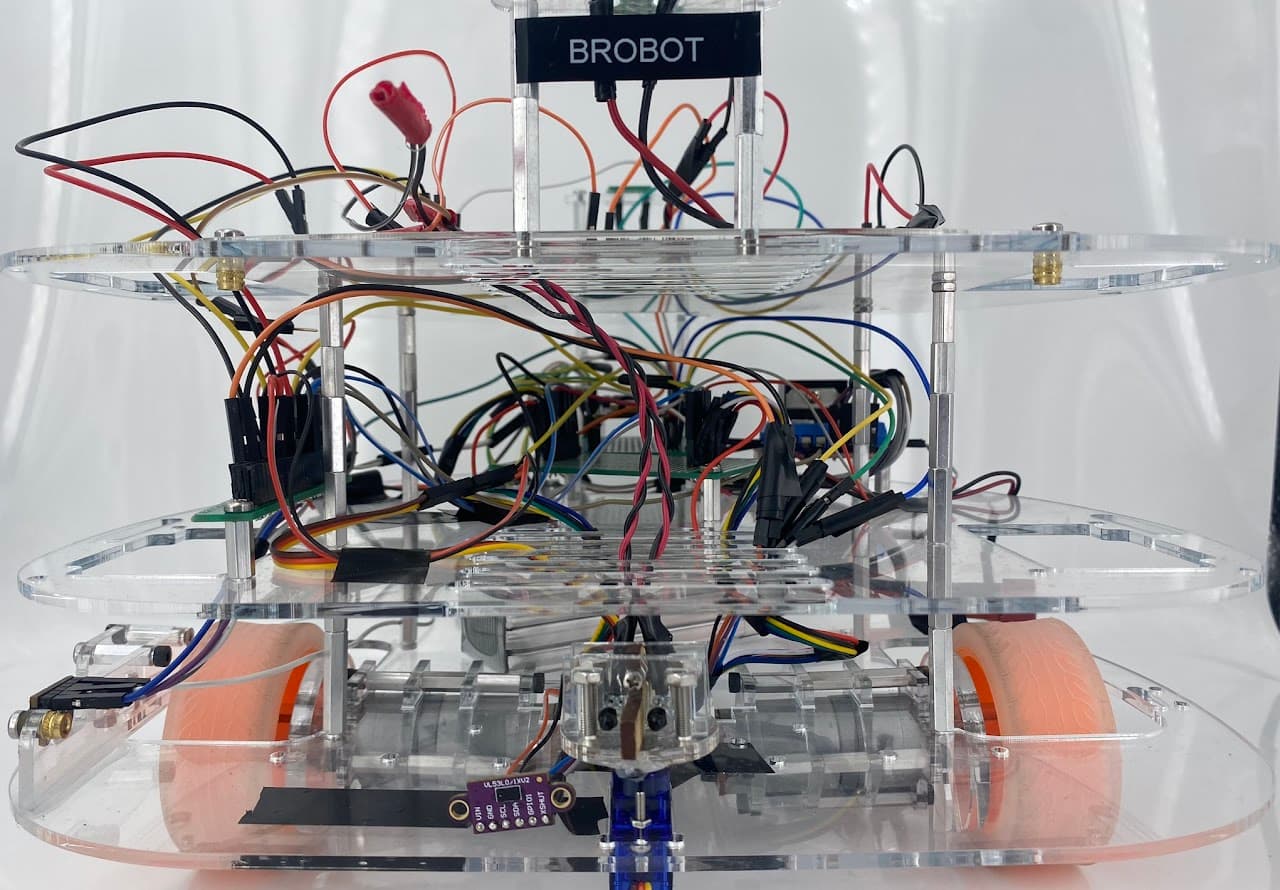
State estimation, vision, mechatronics.
Coursework and side projects that round out the stack: SLAM, ROS 2, computer vision, quadrotors and full-stack mechatronic systems.


Let’s talk
Looking for robotics teams hiring new graduates in 2026.
If you’re building real robots and hiring for robotics software, autonomy, planning, controls, or sim-to-real roles, I’d love to connect.