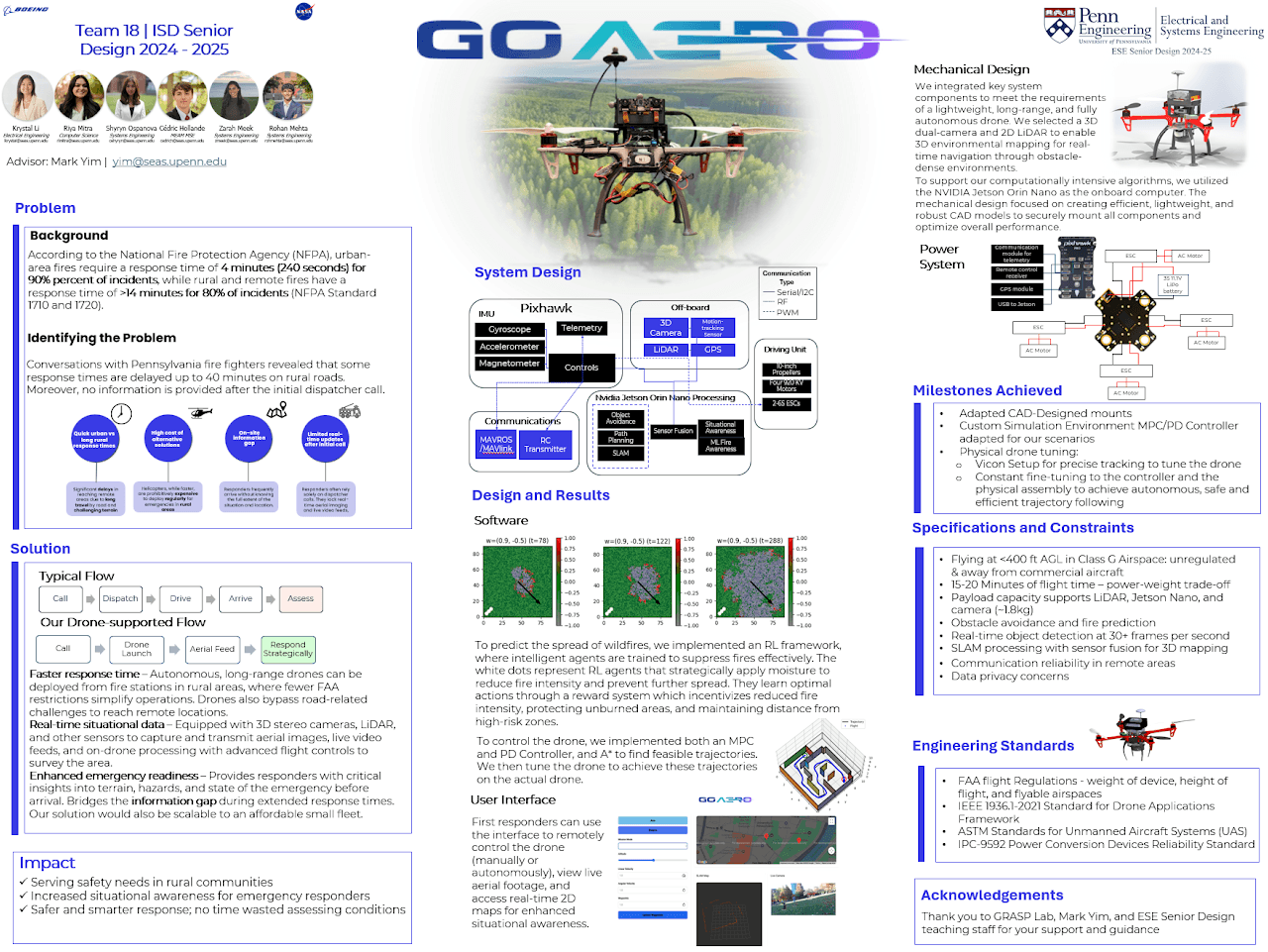
eVTOL firefighting drone for rural response, built with a multidisciplinary team across mechanical, electrical, software, ML and systems. I drove the airframe and hardware design and owned the ROS 2 autonomy and control stack. The onboard computer died the night before our first flight; we rebuilt, re-flashed and still demoed a teleoperated rig with real-time SLAM and obstacle-avoiding trajectories on schedule.
- Custom airframe and payload bay designed for field response
- ROS 2 autonomy stack: SLAM, obstacle avoidance, trajectory planning
- Led mechanical, hardware and autonomy workstreams across 5+ disciplines
- Shipped a working flight under a hard deadline after a critical hardware failure
- Advisor endorsed the platform to scale further