
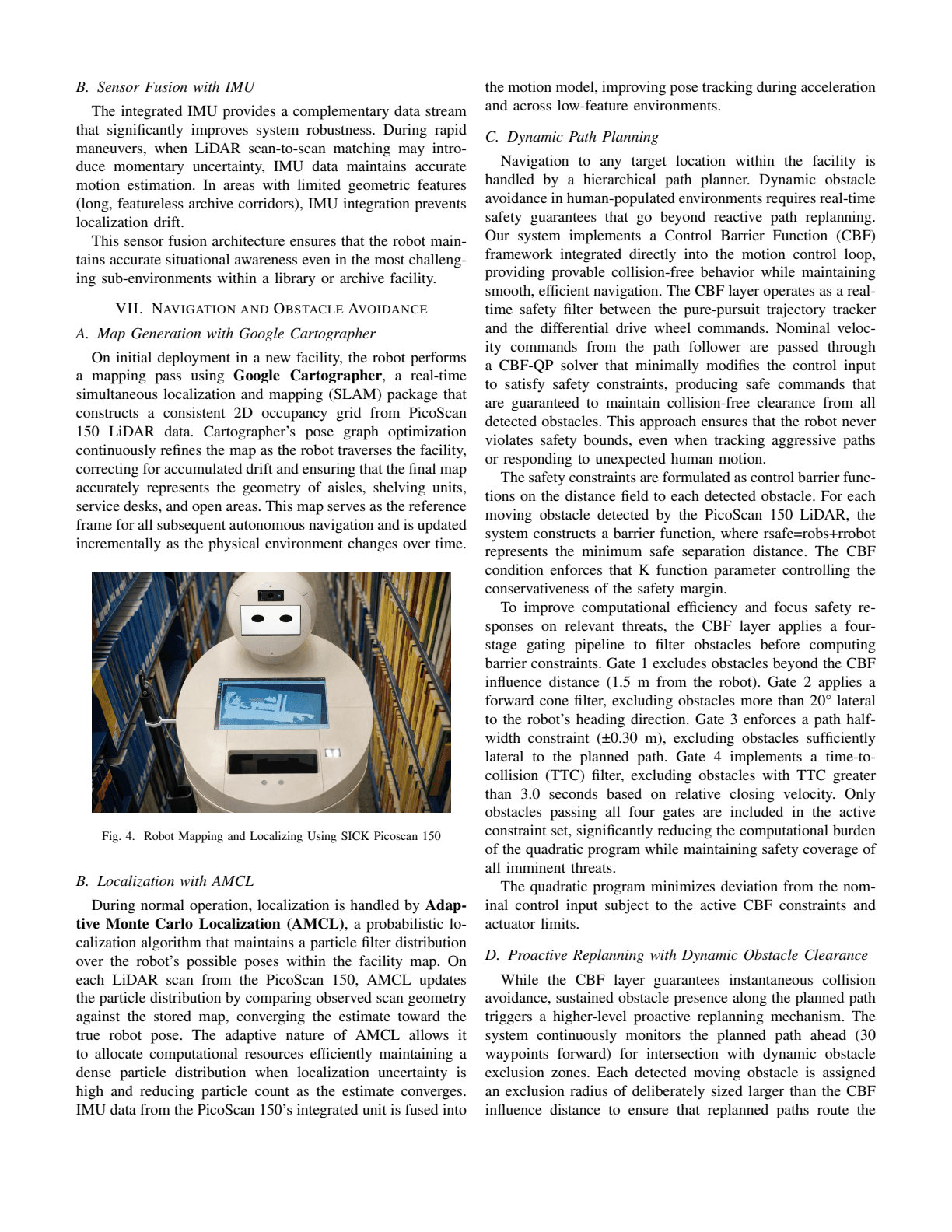
Team prototype of a library service robot, built for the SICK $10K Challenge. The demo showed an autonomous navigation + perception stack scoped to a single robot: shelf scanning, book search, mocked-up check-in/out, and patron interaction. ROS 2 end-to-end on a reverse-engineered Berkshire Grey FlexBot mobile base.
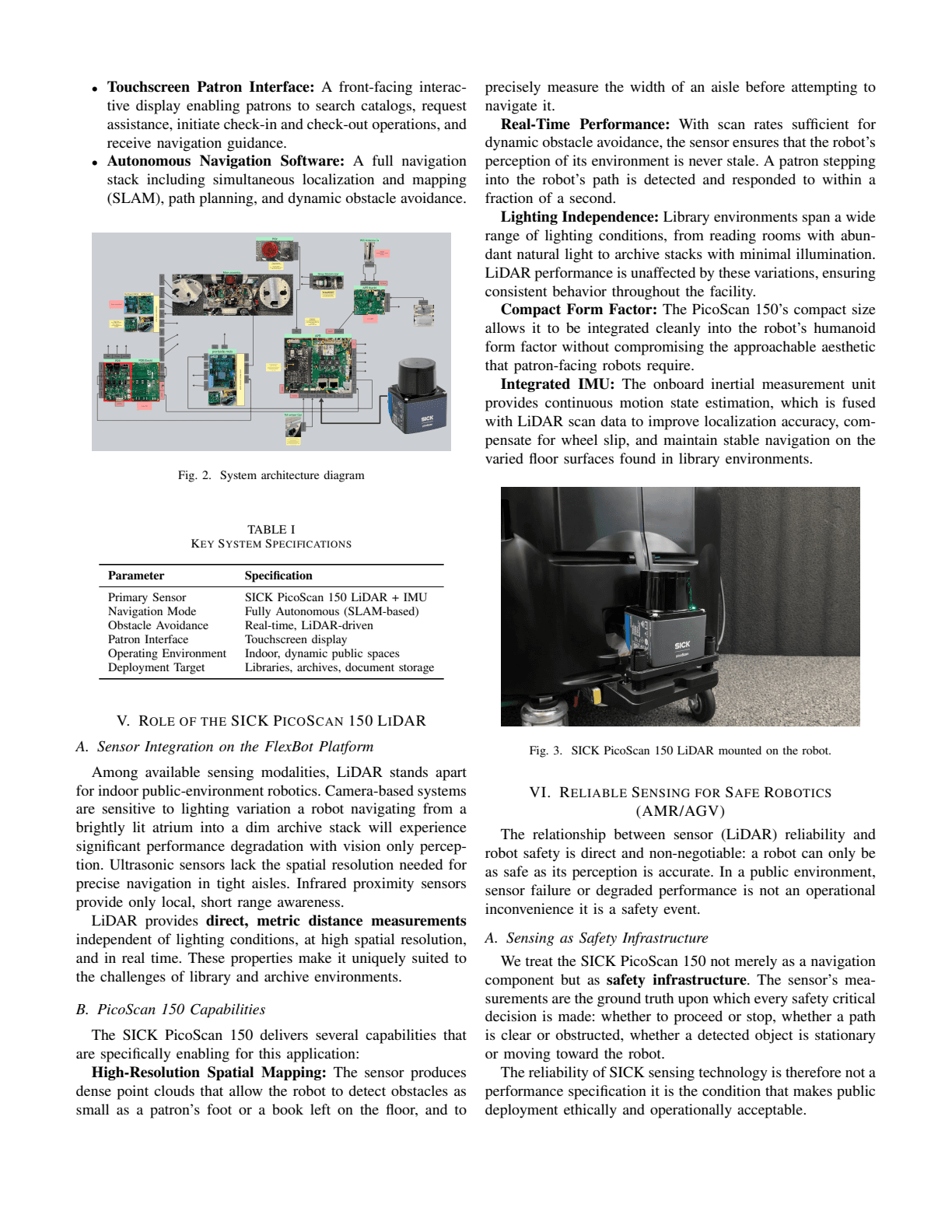
- SICK PicoScan 150 LiDAR + IMU for SLAM, obstacle avoidance, and safe human-shared operation
- Reflective-marker localization using LiDAR intensity returns for shelf-level precision
- OCR-based shelf scanning for inventory verification
- Touchscreen UI + ChatGPT Voice API for catalog search, guidance, and check-in/out flows
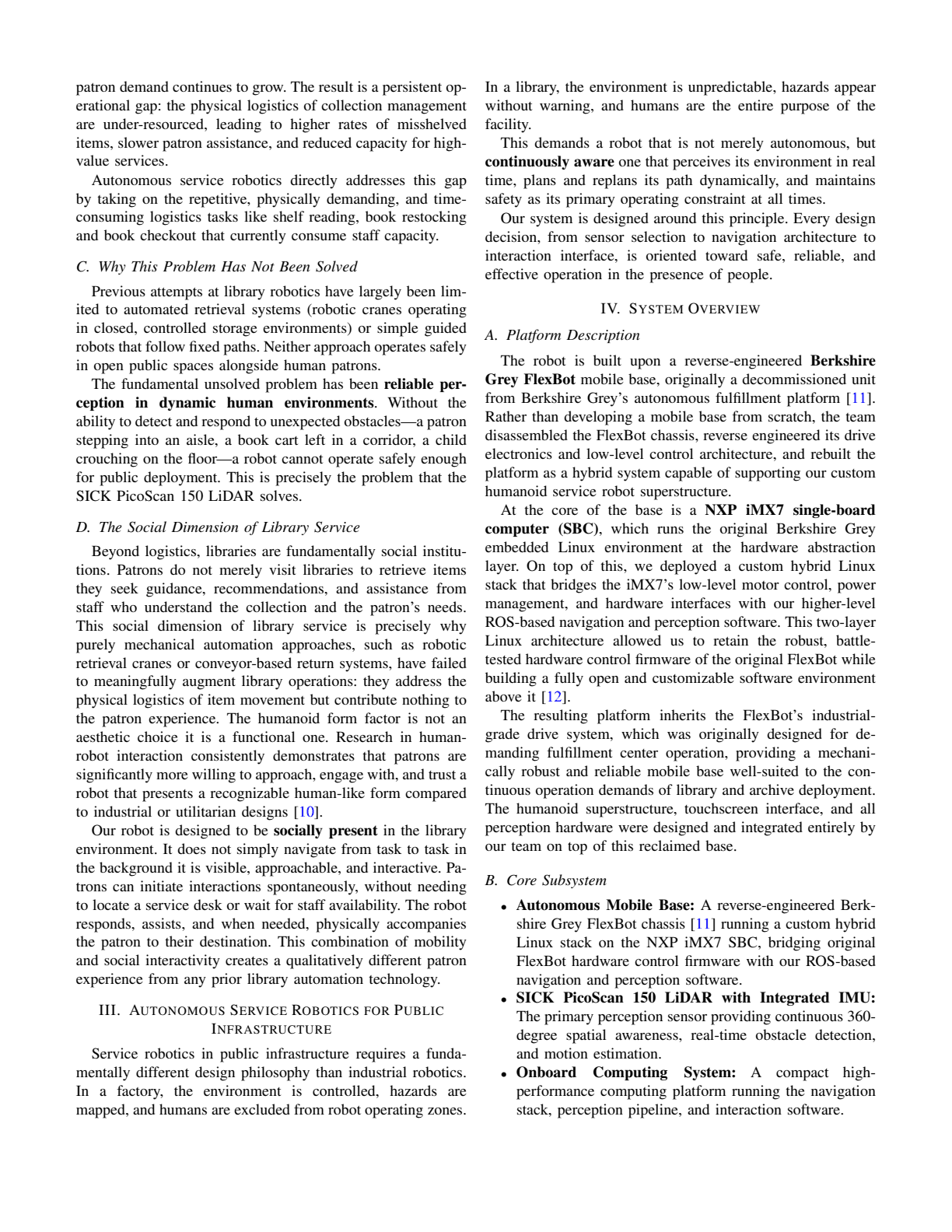
- Reverse-engineered Berkshire Grey FlexBot mobile base
Repo: https://github.com/virmani11kartik/flex_bot/tree/jetson
libot2.mp4