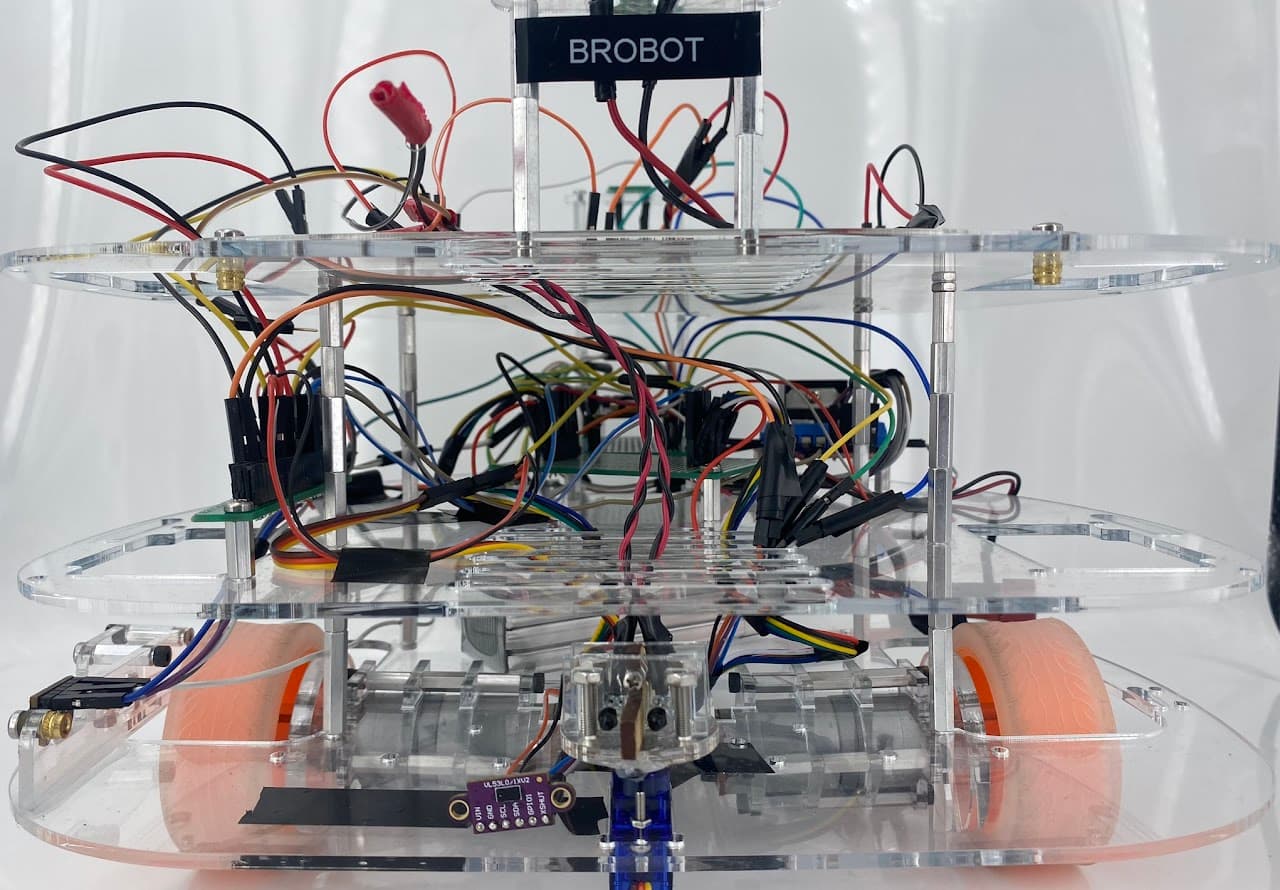
Graduate mechatronics arc (MEAM 5100 at Penn), ending in a semi-autonomous WiFi-controlled car that detects IR-emitting targets, avoids walls, and navigates to waypoints. Mechanical design, electronics, embedded firmware and control theory all on one platform, with every lab building a skill reused in the final project.
- ESP32-S2 controlled over WiFi with PID control and sensor fusion
- Time-of-flight sensors for wall detection and obstacle avoidance
- HTC Vive Lighthouse for absolute XY localization
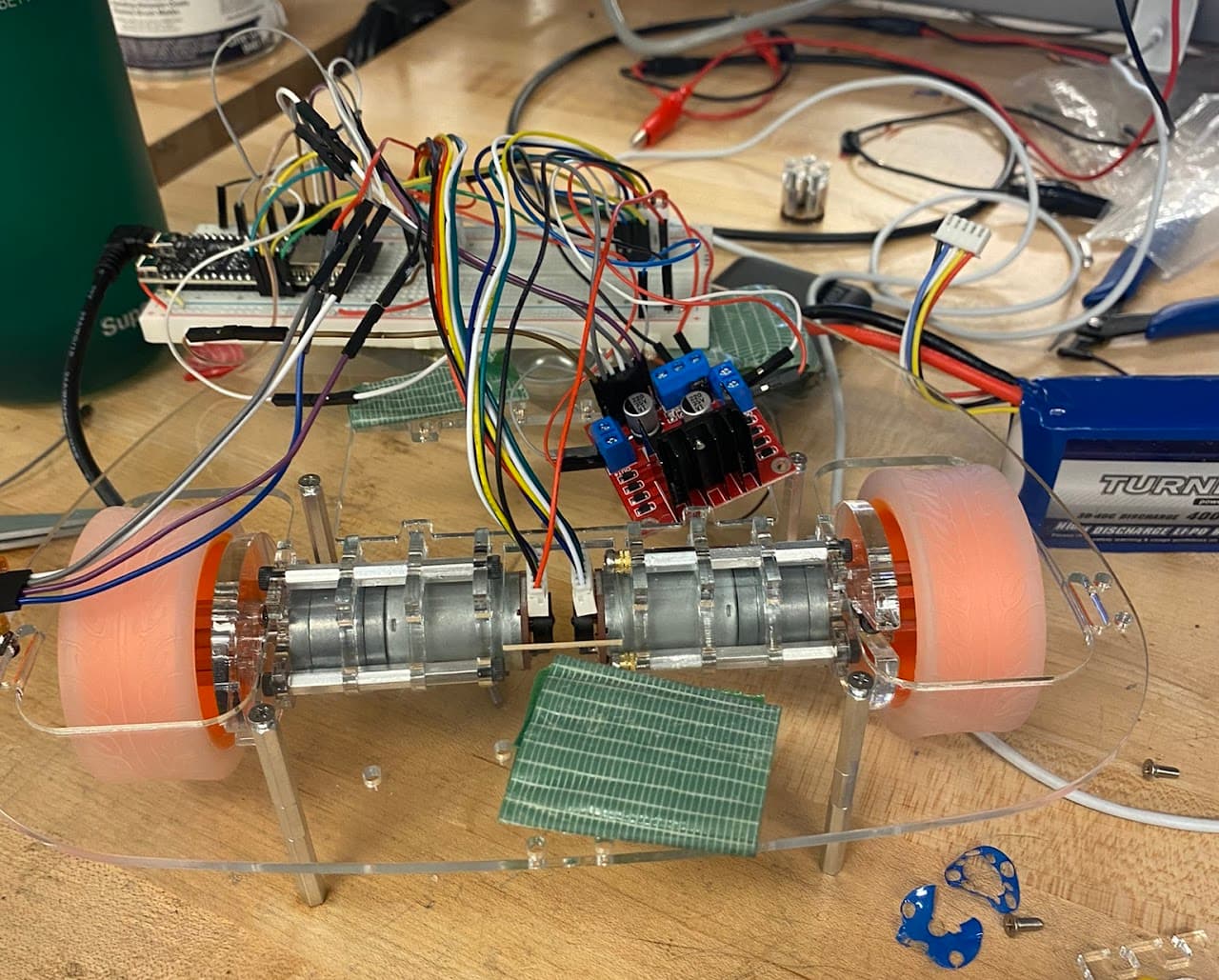
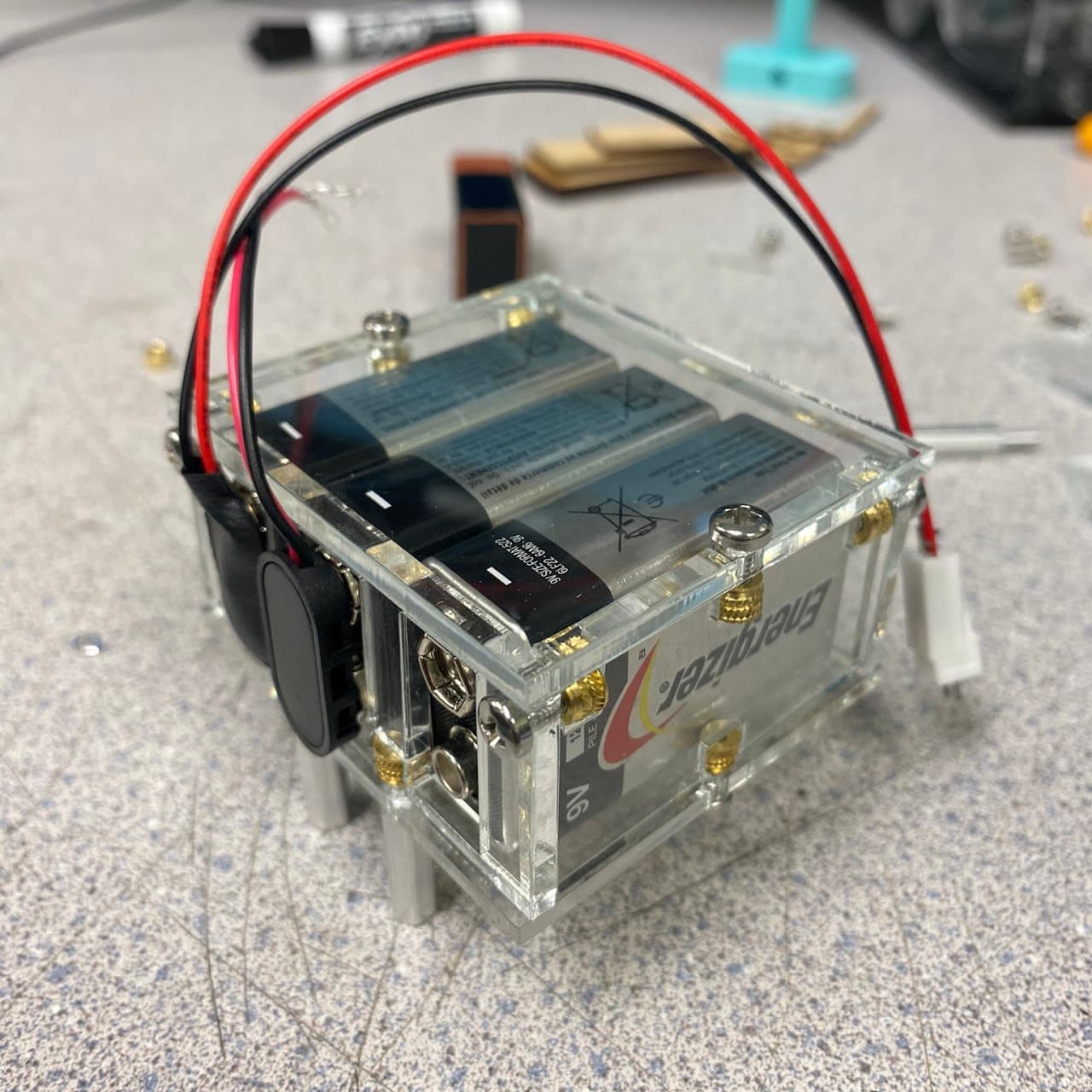
- 1200 RPM drive motors, custom battery pack, hand-built chassis
- Custom wheel mounts designed and tested in the shop
MEAM 5100 Final Project Report
Prior labs
Four labs, each adding a primitive that the final car depended on: drive control, actuation, IR sensing, and basic circuit assembly.
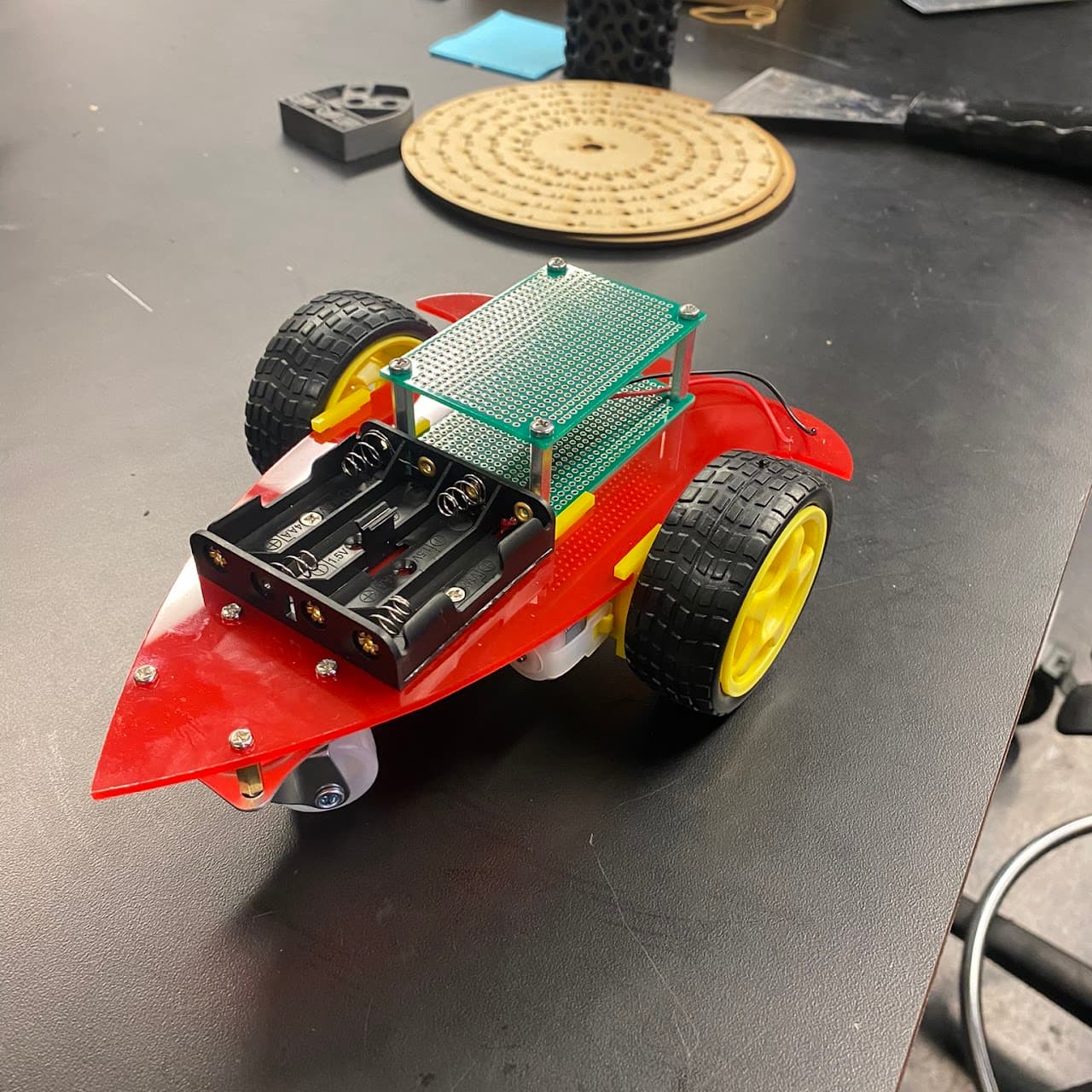
Lab 4.2, RC car with custom wheel mounts
MEAM 5100 - Lab 4.2
Lab 3, Waldo mini arm
Mini robot arm driven from potentiometers, first look at closed-loop actuation.
MEAM 510 - Lab 3 Waldo
IMG_1959.mp4
Lab 2, IR Beacon
IR signal detection, the perception primitive reused in the final car's targeting.
MEAM 510 - Lab 2 Beacon
23884e84-b7e3-415f-8d71-4c448b21e490.MP4
Lab 1, Night light
MEAM 510 - Lab 1
IMG_1763.MOV