End-to-end perception pipelines in Python and PyTorch, from classical geometry to transformer-based matchers. Every project shipped with polished visualizations and point-cloud outputs so the results were actually interpretable.
- Homography-based image projection
- AprilTag pose estimation and augmented reality overlays
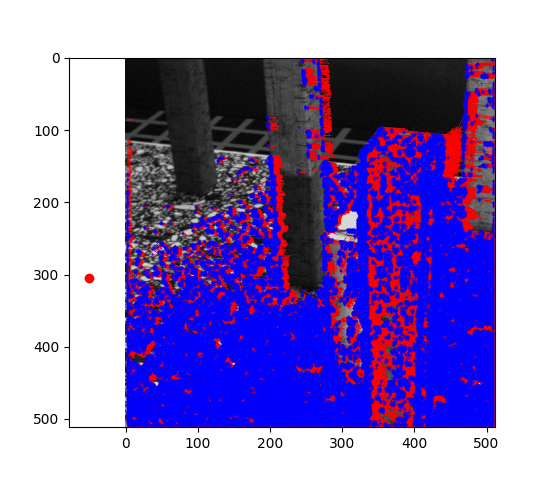
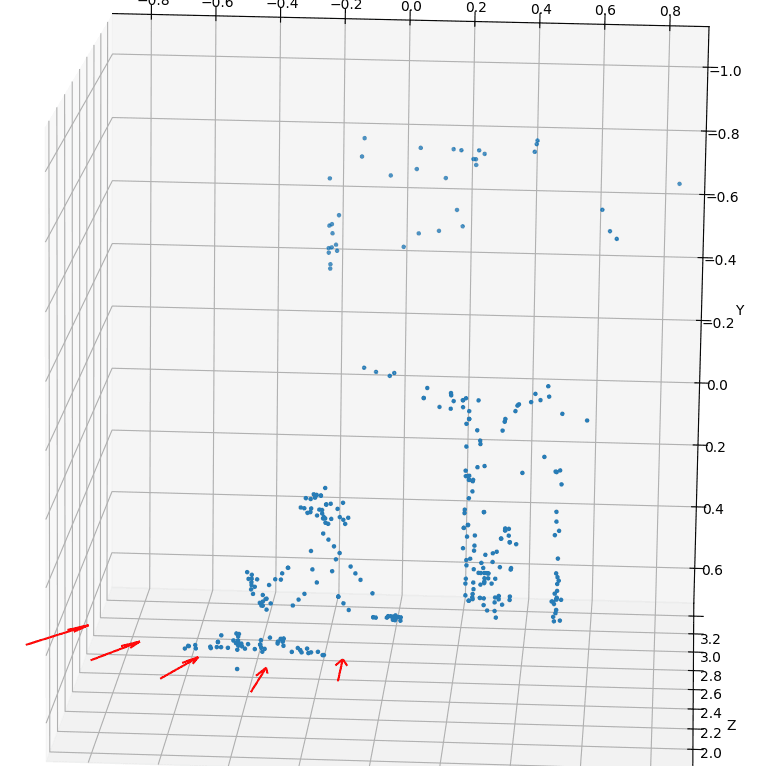
- Two-view 3D reconstruction from stereo pairs
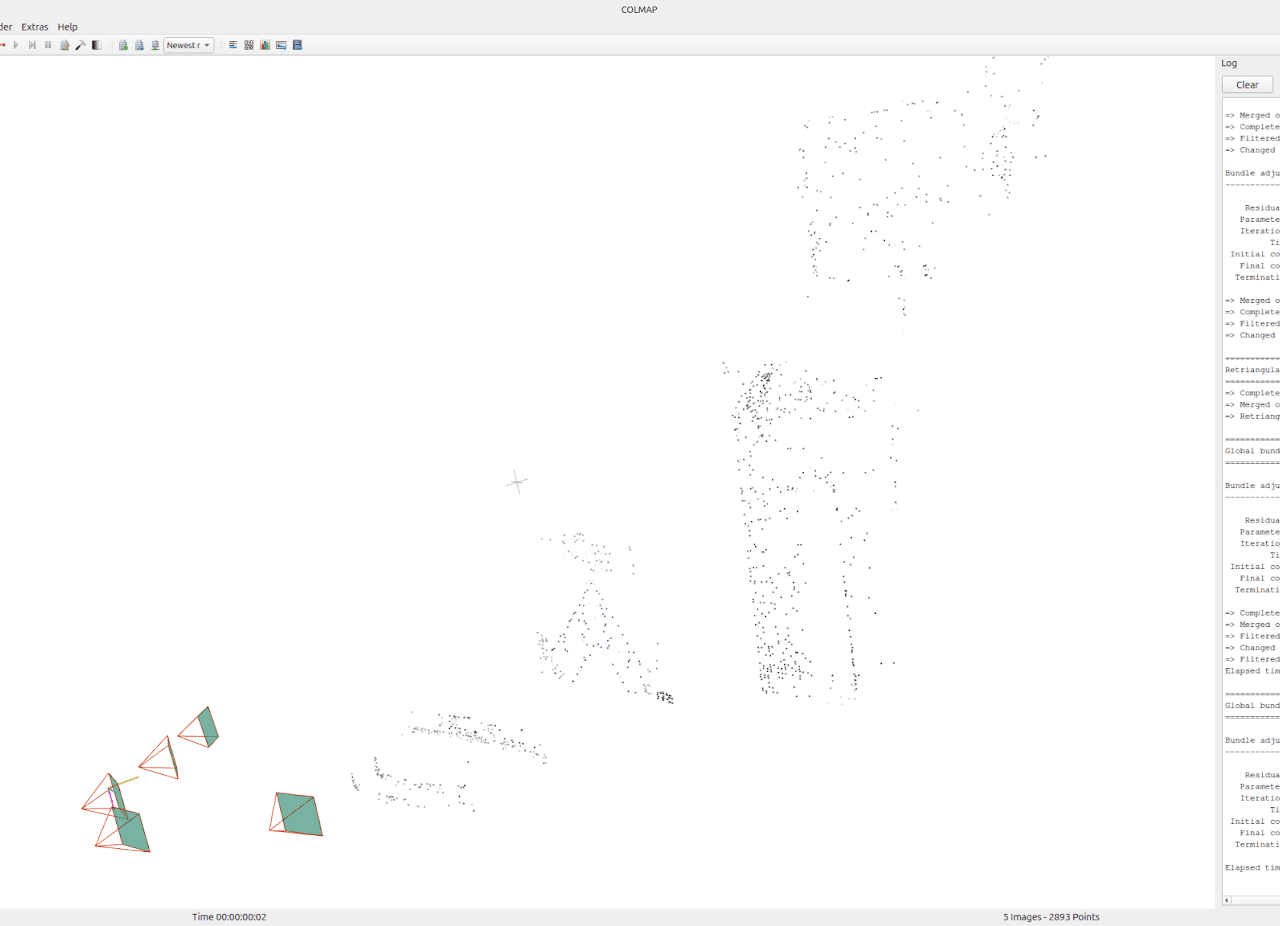
- Optical flow, epipole estimation and bundle adjustment
- SIFT vs LoFTR feature matching benchmark (classical vs transformer)
Repo: https://github.com/cedrichld/CV_basics