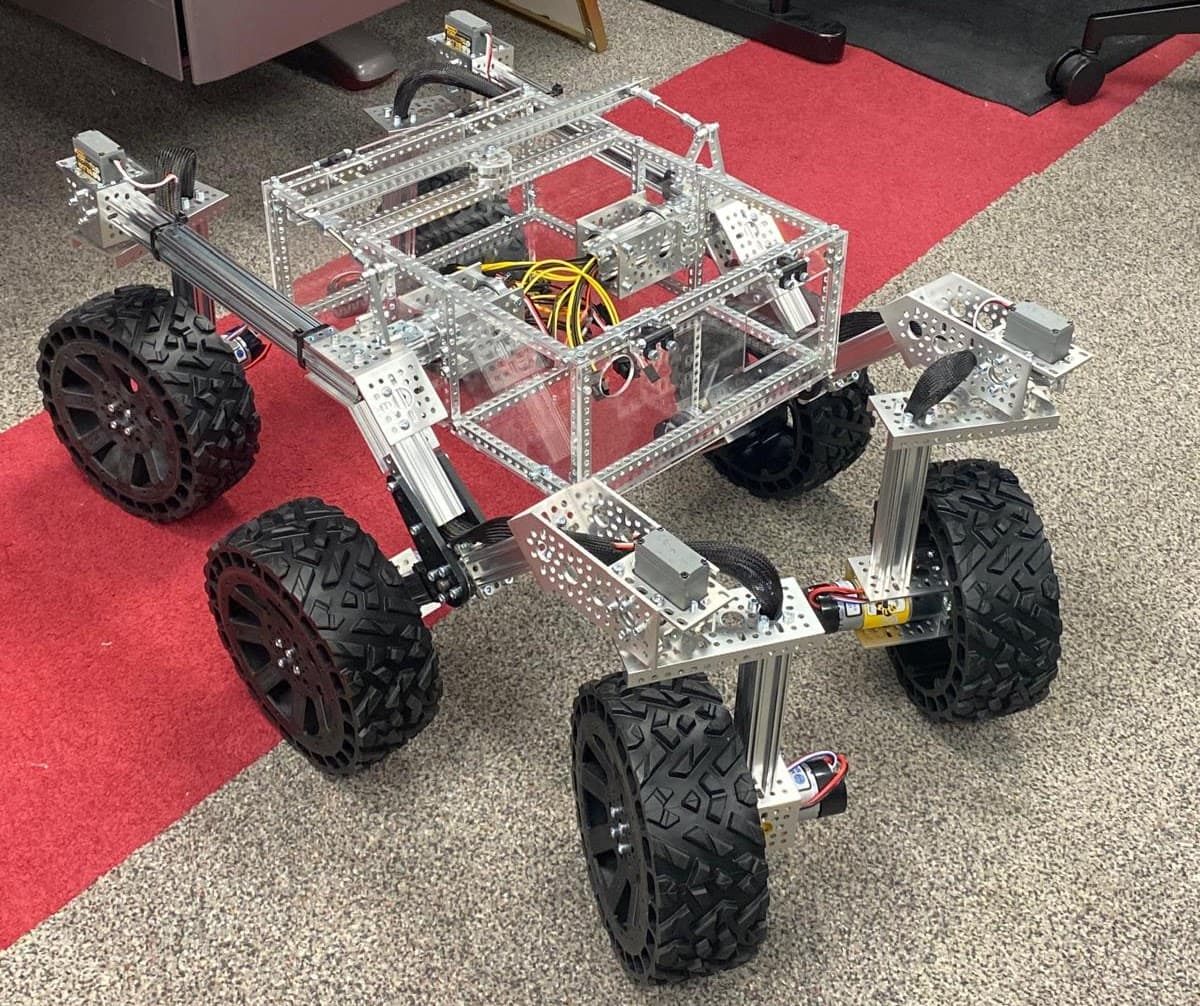
Software Development Intern at NASA Goddard Space Flight Center, *June 2023 to May 2025*. Across two summers + part-time during the school year, I led end-to-end development of a JPL-style rocker-bogie Mars Rover mockup and built the ROS 2 to NASA cFS (Core Flight System) bridge, a telemetry/telecommand testbed that lets modern robotics stacks talk to flight-ready communications. The rover is now a Goddard reference platform for testing space-rated robotics software (Space ROS).
Mars Rover mockup
- Project lead: sourced and consolidated electronic, mechanical and PCB BOMs
- Owned mechanical assembly, wiring harnessing and PCB soldering end to end
- Built the ROS 2 to cFS bridge so flight software can drive a modern robotics stack
- Coordinated a small intern team under a hard delivery deadline
- Delivered a physical rover platform now in active use at Goddard




Telemetry error correction (prior summer)
First summer at Goddard: applied abstract algebra (BCH encoding) to telemetry and telecommand downlinks for long-duration space missions.
- Implemented BCH codeblocks with parity bits in a production-ready encoder
- Cut theoretical error rate from 1e-6 to 1e-16 per bit
- Directly improves data integrity for missions where retransmission isn't an option
Roman Space Telescope and operations

